





Módulo Sensor de Fluxo Óptico Ponto Pairando Controle Posição do Vôo Segurando Placa Módulo Constante vs Cheerson Cx-of Apoio Apm Peças
R$ 67,26
DÚVIDAS?
Envie um email para:
Produtos relacionados






Peças e Acessórios Baratos
Vídeo de Demonstração do Produto
Opção de Compra e tempo de entrega
Aviso Para mais informações sobre esse produto com preço promocionais e forma de entrega, click no botão abaixo e visite o portal da loja

Ficha técnica do produto
| Características | Especificações |
|---|---|
| Distância Entre Eixos | Parafusos |
| Tamanho | 14.21×11.04×4.93mm |
| Parâmetros Técnicos | Kv1100 |
| Número do Modelo | FOR FPV Quadcopter Drone DIY |
| Para Veículos de Tipo | Aviões |
| Suprimentos de Ferramentas | Classe Montada |
| Atributos de Tração NAS Quatro Rodas | Others |
| Periféricos/dispositivos de Controle Remoto | Spot Hovering Control Board |
| Peças/acessórios Para Melhorias | Position Holding Steady Optical Flow Module |
| Peças RC e Acessórios | Mini Optical Flow Sensor |
| Material | Material Composto |
| Nome da Marca | Shuaichi |
| Origem | CN (origem) |
| Recomendar a Idade | 14 + Y |
| Utilização | Veículos e Brinquedos de Controle Remoto |
1PCS Módulo Sensor De Fluxo Óptico Ponto Pairando Controle Posição De Voo Segurando Estável Placa De Módulo VS Cheerson CX-OF Suporte APM
Mini Sensor De Fluxo Óptico Spot Pairando Controle Posição De Voo Segurando Estável Placa De Módulo De Fluxo Óptico Para FPV Quadcopter Drone DIY
O formato dos dados também é compatível com o produto descontinuado Cheerson CX-OF, já suportado pelo ArduCopter.
Nota:
Depois de obter o módulo, você precisa conectar o módulo ao seu próprio controle de voo com um fio e depois ajustar o programa com a cabeça para baixo.
Você pode precisar usar um ferro de solda elétrico.
É impossível jogar com este módulo sem uma certa base de habilidades.
Por favor, pense duas vezes antes de pagar o pedido!!
Característica:
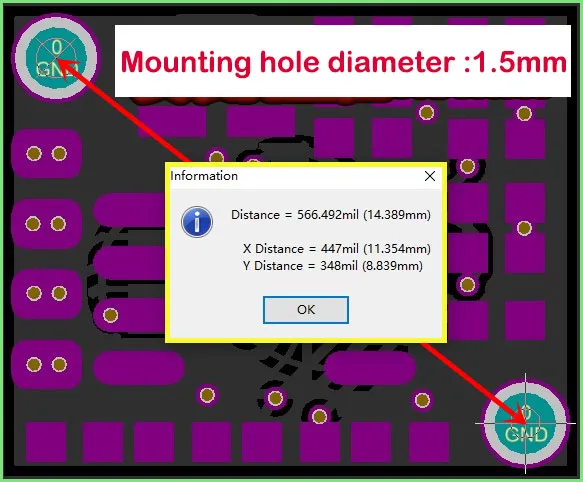
1. tamanho: 14.21×11.04×4.93mm Muito pequeno, apenas 0.6g, mas o desempenho é muito bom. Lamplight normal interno também pode ser usado no piso de cerâmica
2. Sem esquemas! Sem código fonte! Não abra o código!
Interface e protocolo do módulo:
Este módulo envia informações de dados ao computador através da porta serial.
Dados características:
A. Bit de dados de 8 bits, sem bit de verificação, 1 bit stop bit, taxa de transmissão definida para 19200bps.
B. Frequência dos dados: aproximadamente 66fps frame rate para enviar dados ao anfitrião.
C. Outros: se o deslocamento de dois quadros consecutivos for muito pequeno, 0 será emitido e, em seguida, os dados serão emitidos quando o deslocamento for suficiente.
1. Ponto Pairando Controle Posição do Vôo Segurando

Descrição:
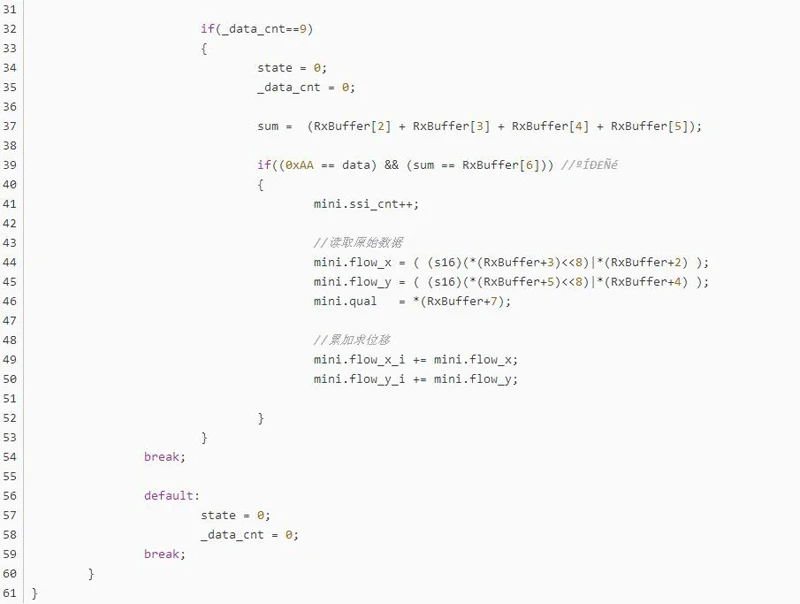
A. Cabeçalho é os dois bytes fixos: OxFE (cabeçalho), 0x04 (número de bytes);
B. DATAO, DATA1 é o baixo e alto oito bits de fluxo-x, ou seja, fow-x = (int16)(DATA1<<8) (DATA0) :
C. DATA2, DATA3 é o baixo e alto oito bits de fluxo-y, ou seja, fluxo-y = (int(DATA3<<8)(DATA2);
D. O último, mas um byte é o byte de verificação, que é o valor acumulado dos quatro bytes de data0-data3, ou seja, SUM = DATAO + DATA1 + DATA2 + DATA3; networking para identificar e traduzir.
&E&. O penúltimo byte é a qualidade do ambiente do solo;
F. O último byte é o identificador final do pacote, fixado como OXAA;
Teste:
Coloque no controle de vôo primeiro. Foi assim que eu o conectei.
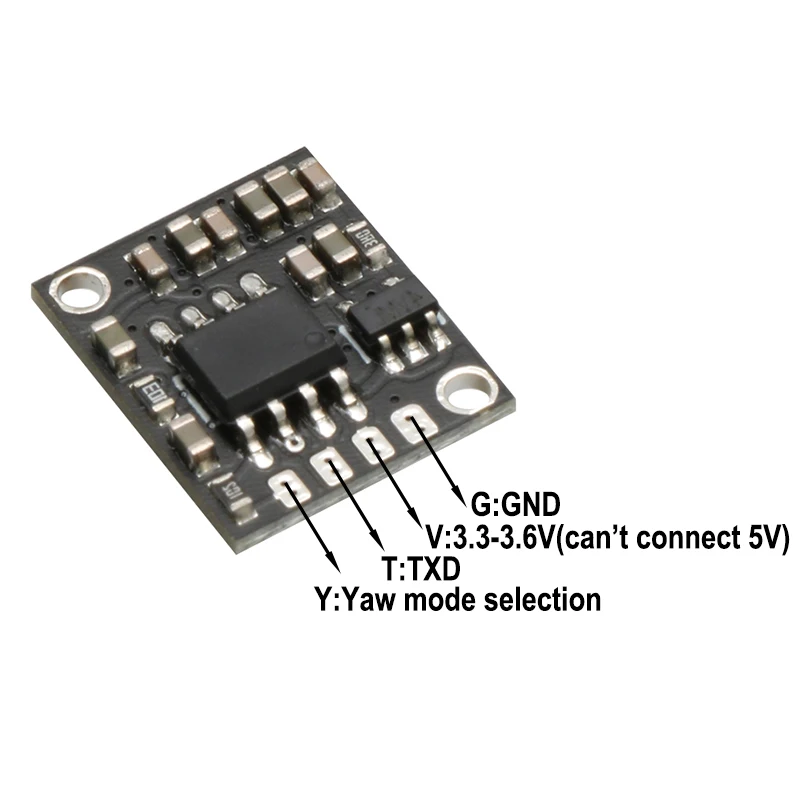
Usei um ferro de solda elétrico para soldar três fios Dupont ao módulo, e então os conectei diretamente à porta serial do controle de voo. Nota: a tensão de entrada é 3.3-3.6v. A tensão é muito baixa para que o módulo funcione corretamente e pode danificar o módulo se for muito alto.
2. High Quality Brinquedos e Hobbies
Primeiro
Dados recebendo e parsing, este ponto não é detalhado, de acordo com o protocolo de comunicação para escrever código, código relativamente simples diretamente sobre ele.
3. Brinquedos e Hobbies

4. Placa Módulo Constante vs Cheerson Cx-of Apoio Apm
Vamos dar uma olhada na curva de dados original da saída de fluxo óptico. Condições de teste: o módulo é aproximadamente 20cm longe do desktop, a lente está enfrentando o desktop, e a escala da saída de dados é aproximadamente +-30:
5. 1 Pces Módulo Sensor de Fluxo Óptico

Segundo
Processamento de dados de fluxo óptico (uma vez que os dados emitidos por esse fluxo óptico não sofreram fusão inercial, devem ser processados antes de poderem ser usados).
Em O primeiro passo , Um filtro passa-baixa simples é aplicado ao deslocamento integral.
6. Cheap Peças e Acessórios

Passo 2 , O deslocamento integral (# define angle_to _ rad 0.0174f // arco) é compensado pela atitude Ângulo.
7. Peças e Acessórios

Nota: 600.0f é um parâmetro importante! Precisa ajustar lentamente, ajustar a como apenas calcular elegíveis
Quando o plano está tremendo in situ, as curvas pixel_flow.fix_x_i e pixel_flow.ang_x podem ter quase a mesma amplitude de mudança, os dois se compensam para alcançar o efeito de compensação. Ou, para colocar desta forma: as curvas pixel_flow.fix_y_i e pixel_flow.ang_y variam quase na mesma quantidade (observe em particular que os dados de deslocamento integral aumentarão ou diminuirão lentamente quando o plano estiver rolando no lugar, que é o fenômeno da deriva integral e é normal).
Curva de pixel_flow.fix_x_i e pixel_flow.ang_x quando o avião está tremendo no lugar:
8. Ponto Pairando Controle Posição do Vôo Segurando

Passo 3 , O deslocamento integral é diferenciado para obter a velocidade.1
9. High Quality Brinquedos e Hobbies

Agora, algumas pessoas podem estar confusas com isso, por que diferenciamos a velocidade em vez de apenas usar a saída do fluxo óptico como a velocidade A razão é que os dados de saída deste módulo de fluxo óptico não é estritamente falando a velocidade, mas o deslocamento relativo de dois quadros consecutivos em pixels.
A curva da velocidade do avião à medida que ele se move para frente e para trás em um plano horizontal:
10. Brinquedos e Hobbies

O propósito de compensar o deslocamento integral com atitude Ângulo é manter o deslocamento integral o mais constante possível quando o plano está tremendo in situ. Por que queremos manter o deslocamento integral o mais constante possível Muito simplesmente, porque o avião está tremendo no lugar, o deslocamento não está mudando.
Quando o plano está agitando in situ, a curva de deslocamento integral após a atitude Compensação do ângulo é mostrada como segue:
11. Placa Módulo Constante vs Cheerson Cx-of Apoio Apm

Passo 4 -A. Converta unidades de dados em centímetros.
12. 1 Pces Módulo Sensor de Fluxo Óptico

Neste ponto, o processamento de dados de fluxo óptico é basicamente concluído. Com os dois parâmetros de deslocamento integral e velocidade diferencial, o controle PID em cascata do loop de posição e do loop de velocidade no plano horizontal pode ser realizado.
Finalmente , Vou fornecer-lhe um assistente de depuração de fluxo óptico. Depois de conectar o mini módulo de fluxo óptico ao computador através do módulo da porta serial, você pode abrir o computador superior para visualizar os dados do módulo de fluxo óptico e ter a função de exibição dinâmica, o que é muito conveniente! O protocolo de comunicação é consistente com o descrito neste artigo.
13. Cheap Peças e Acessórios

Perguntas e respostas do comprador:
Q1: Será que funciona em pixhawk 2.4.8
A1: Sim, ele funciona em pixhawk 2.4.8.
Q2: Serve o drone SG 106 versão 720p
A2: Não, não serve o drone SG 106 versão 720p.
Q3: Funciona no APM 2,8
A3: Não, ele precisa ser usado no firmware Ardupilot ou PX4 no Pixhawk.
Nota especial sobre Y pin:
? Este pino é a porta seleção modo guinada. É ativo baixo e o padrão é alto (modo normal) na inicialização.
? Quando o drone está em movimento de guinada, recomenda-se puxar o pino Y para fazer o módulo entrar no modo de guinada.
? Quando o sensor não está em movimento de guinada, puxe o pino Y alto para colocar o módulo no modo normal.
? Se o módulo não ativar o modo de guinada durante o movimento de guinada, isso pode causar jitter e drift. Pode ser melhorado depois de ligar o modo de guinada.
? Se o módulo está no modo da guinada quando o zangão não está no movimento da guinada, a linearidade dos dados do módulo pode ser deteriorada.
? Se você não entender o conteúdo acima, por favor, ignore o pino Y, basta pensar nele como inexistente.
14. Peças e Acessórios

15. Ponto Pairando Controle Posição do Vôo Segurando

16. High Quality Brinquedos e Hobbies

17. Brinquedos e Hobbies

18. Placa Módulo Constante vs Cheerson Cx-of Apoio Apm

19. 1 Pces Módulo Sensor de Fluxo Óptico
Avaliações de Usuários
Seja o primeiro a avaliar “Módulo Sensor de Fluxo Óptico Ponto Pairando Controle Posição do Vôo Segurando Placa Módulo Constante vs Cheerson Cx-of Apoio Apm Peças”
Módulo Sensor de Fluxo Óptico Ponto Pairando Controle Posição do Vôo Segurando Placa Módulo Constante vs Cheerson Cx-of Apoio Apm Peças
R$ 67,26

Não existe nenhuma avaliação ainda.